
Аббревиатура avd расшифровывается как android
Обновлено: 18.05.2024
Здесь расшифрованы непонятные термины, сокращения, аббревиатуры, которые относятся к платформе Android и программированию под Андроид.
aapt Android Asset Packaging Tool - этот инструмент берет Ваши файлы ресурсов приложения, такие как файл AndroidManifest.xml, и XML-файлы Ваших Activity, и компилирует их в Java-класс R (получается модуль R.java). Класс R.java создается для того, чтобы Вы могли обращаться к ресурсам из кода Java по символическим именам.
ACTION действие
activity класс, некая одиночная сущность в приложении, на которой фокусируется внимание пользователя (т. е. представляет визуальный интерфейс, с которым имеет дело пользователь программы). К примеру, класс Activity заботится о создании для Вас окна, на котором организуется интерфейс взаимодействия с пользователем. Хотя activity это обычно окно, открытое на весь экран, но это необязательно - это могут быть плавающие окна. Activity может быть также вложенным в другое Activity.
ADB Android Debug Bridge.
ADT Android Developer Tools, это плагин для IDE Eclipse, предоставляющий набор инструментов для интеграции в эту среду разработки. Плагин предоставляет доступ ко многим возможностям, чтобы помочь Вам быстро разрабатывать приложения для Android. В ADT встроен графический интерфейс пользователя (GUI) ко многим утилитам командной строки SDK, а также инструментарий для разработки пользовательского интерфейса программ. Подробнее см. [5].
Android.mk это файл с инструкциями для make (файл makefile), указывающий, как компилировать некий код (обычно код C/C++ NDK).
ANR диалог Application Not Responding (приложение не отвечает).

Ant вспомогательная утилита для компиляции приложений Android, написанная на Java. Она была написана как часть открытого проекта Apache. Можно думать об утилите Ant как о своеобразной утилите make. Скрипты для Ant основаны на XML и имеют соответствующую структуру.
API level число, определяющее разновидность API OS Android. Это число, зависящее от версии системы, и оно определяет совместимость приложений Android с системой. Чем больше число, тем свежее релиз системы Android.
AVD Android Virtual device. Специальное устройство, которое нужно для эмулятора Android, когда Вы проверяете работу своей программы. AVD соответствует какому-то смартфону, на котором будет работать разрабатываемая программа, и определяет его свойства - разрешение экрана в точках, версия операционной системы и т. п. Можно задать несколько разных AVD; одно скажем будет с экраном 320x480 и операционной системой Android 2.2, другое 480x800 с Android 3.0.
CDT расшифровывается как C/C++ Development Tooling, специальный плагин для Eclipse, обеспечивающий поддержку native-языка C и C++.
DDMS Dalvik Debug Monitor Server
dpi dots per inch - сколько точек приходится на один дюйм. Характеристика, относящаяся к качеству отображения и печати. В контексте Android означает разрешающую способность экрана устройства.
drawable padding, drawablePadding отступ, расстояние между отдельными графическими элементами. Например, расстояние в пикселах между графикой радиокнопки и текстовой меткой.

gdbserv, gdbserver сервер для отладки с помощью отладчика GDB.
gesture жесты - специальные движения пальцами по тачскрину, предназначенные для организации интерфейса управления пользователя (UI). На картинке ниже показаны обычные для Android жесты.

GWT (из Википедии) Google Web Toolkit - свободный Java-фреймворк, который позволяет веб-разработчикам создавать Ajax-приложения на основе Java. Выпускается под лицензией Apache версии 2.0. GWT делает акцент на повторное использование и кроссбраузерную совместимость.
heap куча, пул динамически распределяемой памяти. Применяется для создания runtime (во время выполнения) переменных, экземпляров объектов и классов. В Android есть две кучи: Managed heap (управляемая куча, применяется для приложений, работающих в виртуальной машине Java Dalvik) и Native heap (традиционная куча, относится к OpenGL/BMP).
Instrumentation базовый класс для реализации в приложении кода инструментария. Когда код работает с включенным инструментарием, этот класс инстанцируется перед любым кодом приложения, что позволяет Вам мониторить все взаимодействия приложения с системой.
IPC Interprocess Communication, взаимодействие между процессами.
jdb java debugger - отладчик кода Java, запускаемый из командной строки.
JDK Java Development Kit.
JDWP Java Debug Wire Protocol - протокол, используемый для обмена между отладчиком и виртуальной машиной Java, в которой выполняется отлаживаемая программа (виртуальная машина иногда называется target VM).
JNI Java Native Interface - интерфейс взаимодействия Java и библиотеками на C/C++. Спецификация (стандарт), предоставленный компанией Sun для двух целей: позволить вызывать низкоуровневый код из кода Java и вызывать Java-методы из низкоуровневого кода. Под низкоуровневым кодом обычно понимается код на языке C/C++.
JRE Java Runtime Environment. Среды разработки под Windows наподобие Eclipse и Android Studio также написаны на Java, поэтому для их выполнения также нужно установить JRE (его можно бесплатно скачать с сайта Oracle).
javah.exe специальная магическая утилита JDK, которая генерит для всех методов классов Java с префиксом native файлы-заголовки *.h, на основе которых потом пишется реализация native-методов (модули кода на языках C и C++).
JVM Java Virtual Machine, виртуальная машина Java. Java-программа всегда работает на так называемой виртуальной машине, так что приложение ничего не знает о физическом устройстве, на котором выполняется. Благодаря такой организации достигается кроссплатформенность Java-программ. Т. е. практически вся забота о железе перекладывается на виртуальную машину. Если для какой-то платформы (телефон, смартфон, ноутбук, компьютер и т. п.) есть реализация виртуальной машины Java, то значит на ней можно запускать Java-код. На Android эта виртуальная машина почему-то называется Dalvik.
inflate метод, который из содержимого layout-файла позволяет создать View-элемент. Слово inflate в этом контексте переводится как расширять, заполнять.
layout в контексте программирования Android это слово обозначает планировку экрана приложения и конфигурацию визуальных элементов, из которых приложение состоит.
MCC Mobile Country Code, мобильный код страны - идентификатор, характеризующий текущую конфигурацию устройства Android.
MNC Mobile Network Code, код мобильной сети - идентификатор, характеризующий текущую конфигурацию устройства Android.
MTP Media Transfer Protocol - основанный на PTP аппаратно-независимый протокол, разработанный компанией Microsoft для подключения цифровых плееров к компьютеру. Первая версия вышла в 2004 году. В первую очередь MTP рассчитан на передачу данных через USB, но он пригоден и под TCP, и под Bluetooth. В 2008 году MTP-устройствам выделен стандартный USB-класс. Поддерживается Android, начиная с версии Honeycomb 3.0.
native в данном контексте означает языковую среду программирования, отличающуюся от Java (обычно это C/C++). Из-за того, что базовым языком программирования для Android является Java и только Java, то для совместной разработки программ на C и на Java понаделано немало костылей в виде javah.exe. Все внешние методы, которые реализованы вне кода на Java, должны быть объявлены с префиксом native, и для них должны быть сгенерирован заголовочный файл с помощью утилиты javah.exe.
NDK Native-code Development Kit.
OTA Over The Air update service.
PDE Plug-in Development Environment (рабочее окружение для поддержки разработки плагинов) предоставляет инструментарий для создания, разработки, тестирования, отладки, сборки и распространения плагинов Eclipse и других программных компонентов.
PPP Point-to-Point Protocol - двухточечный протокол канального уровня (Data Link) сетевой модели OSI. Обычно используется для установления прямой связи между двумя узлами сети, причем он может обеспечить аутентификацию соединения, шифрование (с использованием ECP, RFC 1968) и сжатие данных. Используется на многих типах физических сетей: нуль-модемный кабель, телефонная линия, сотовая связь и т. д. В контексте ADB протокол PPP применяется поверх протокола USB.
PPPD демон (служба), обслуживающий протокол PPP.
RPC Remote Procedure Call, вызов удаленной процедуры. Здесь по "удаленной" подразумевается, что процедура не здесь, а "далеко". Т. е. вызываемая процедура может находиться не в том же процессе и даже не в той же программе (и иногда даже не на том же компьютере), что и вызывающий процедуру код, а в другом процессе (этот процесс может принадлежать другой программе или операционной системе). RPC обычно используют для организации взаимодействия между процессами (см. IPC).
SDK Software Development Kit (здесь для Android), пакет программного обеспечения для поддержки разработки ПО.
shell (шелл) оболочка командной строки, которая позволяет запускать текстовые команды на экземпляре эмулятора/подключенного устройства. Remote shell - то же самое, просто имеется в виду запуск шелла на удаленном (доступном через сетевое подключение) эмуляторе/устройстве.
splash screen экран, который сразу показывается пользователю при старте приложения (splash буквально переводится как "всплеск"). Цель этого экрана - отвлечь внимание пользователя от ожидания окончания загрузки всех компонентов программы.На splash screen обычно отображают либо логотип разработчика программы (иногда анимированный) вместе (или без него) с индикатором прогресса загрузки. Может быть также отображено традиционное вращающееся кольцо, означающее ожидание.
UI User Interface - интерфейс пользователя. Под этим обычно понимается внешний вид экрана приложения (программы) Android и алгоритм взаимодействия приложения с пользователем.
URI Uniform Resource Identifier, унифицированный (единообразный) идентификатор ресурса. Это текстовая строка, по которой можно найти какие-либо данные, например файл. Простейший пример URI: "file:///tmp/android.txt".
WYSIWYG What You See Is What You Get, в переводе означает "что видишь, то и получишь". Термин относится к визуальным редакторам текста и графики.
Виртуальное устройство Android (Android Virtual Device, AVD) позволяет разработчику тестировать свои приложения, не имея под рукой телефона с Android. Можно создавать несколько эмуляторов – устройств AVD, с различными видами конфигурации, чтобы эмулировать различные типы реальных телефонов.
Стандартный эмулятор работает достаточно медленно. Если на Вашем ПК установлен процессор Intel с поддержкой технологии виртуализации VT-x (Intel Virtualization Techology for x86 VT-x) (данные параметры устанавливаются в BIOS), то достаточно просто можно повысить его производительность. Для этого необходимо с помощью SDK Manager инсталлировать следующие пакеты:
- Intel x86 Atom System Image
- Intel x86 Emulator Accelerator (HAXM)

Образ Intel x86 Atom System Image будет доступен при создании и настройке конкретного эмулятора.

Далее необходимо установить пакет Intel x86 Emulator Accelerator (HAXM). Он находится здесь \sdk\extras\intel\Hardware_Accelerated_Execution_Manager.
Установка Intel HAXM
В процессе установки вам предложат определить объем выделяемой оперативной памяти. Вы можете оставить значение, предложенное по умолчанию. Если в процессе работы вы захотите изменить это значение – запустите установку еще раз.


В этом случае проверьте настройки в BIOS, возможно виртуализация поддерживается вашей системой, но по умолчанию отключена.
Размеры и разрешение экрана
Общие сведения о размерах и разрешении экранов нам понадобятся при создании виртуального устройства. Приведем основные сведения.
Существует 4 диапазона размеров экранов:
small - QVGA (320x426 dp)
normal - HVGA (320x470 dp)
large - VGA (480x640 dp)
xlarge - HVGA (720x960 dp), доступно с API 9 (Android 2.3)
и следующие диапазоны плотностей экранов:
| Плотность пикселей на дюйм | Соотношение dp к px |
| ldpi - 120dpi | 1 dp = 3/4 px |
| mdpi - 160dpi | 1 dp = 1 px |
| hdpi - 240dpi | 1 dp = 1.5 px |
| xdpi - 320dpi | 1 dp = 2 px |
| xxdpi - 480dpi (с API 16, Android 4.1) | 1 dp = 3 px |
| xxxdpi - 640dpi (с API 18, Android 4.3) | 1 dp = 4 px |
| nodpi - "как есть" | |
| tvdpi - 1.33 * mdpi | 1 dp = 1.33 px |
Вот несколько примеров:
- QVGA (Quarter Video Graphics Array) 240x320 dp – низкая плотность, размер 2-3,5″;
- WQVGA (Wide Quarter Video Graphics Array) 240x400 dp – низкая плотность, размер 2-3,5″;
- HVGA (Half Video Graphics Array) 320x480 dp – средняя плотность, размер 3-4″;
- WVGA800 (Wide Video Graphics Array) 480x800 dp) –высокая плотность, размер 4-7″;
- WVGA854 (Wide Video Graphics Array) 480x854 dp) –высокая плотность, размер 4-7″;
Создание виртуального устройства
После установки образа эмулятора Android для x86 необходимо создать новое виртуальное устройство с помощью Android Virtual Device Manager. Для этого:
- Запускаем ADV Manager. Меню Tools|Android|AVD Manager.
Примечание. Если запустить ADV Manager из папки установки SDK, то появится более простое и знакомое диалоговое окно по IDE Eclipse. - Выбираем создание устройства "+Create Virtual Device"


На этом экране из возможных типов эмуляторов мобильных устройств выбираем тип Phone и переходим к выбору эмулятора модели телефона.
В начале разработки приложения, как правило, наиболее важным параметром эмулятора является скорость его работы, поэтому следует выбрать достаточно простой и быстрый эмулятор. На последующих этапах разработки приложения можно перейти на эмулятор, который наиболее точно моделирует работу реального устройства или использовать реальное устройство. В этой связи для учебных целей выбираем устройство: Nexus One (3.7” 480x800 hdpi) или Nexus S(4.0"480x800 hdpi). Эти эмуляторы требует немного оперативной памяти (500 mb и 375 mb) и поэтому достаточно быстро работают. Следует помнить, что «крутой эмулятор» потребует большие ресурсы ПК, что приводит к медленной его работе, а иногда он может просто не запуститься.
Далее жмём кнопку "Next" и переходим на экран, предлагающий выбрать версию операционной системы для эмулятора.

У Google издавна сложилась традиция называть разрабатываемые версии операционных систем тремя словами:
KitKat - Key Lime Pie(Лаймовый Пирог)
Lollipop - Lemon Meringue Pie(Лимонный Пирог Безе)
MNC - Macadamia Nut Cookie (Печенье из Ореха Макадамия).

Поскольку на ПК, на котором будет запускаться эмулятор, установлен процессор Intel с поддержкой технологии виртуализации VT и используется ОС Windows 7 x86, то выбираем Lollipop уровень API 22, ABI x86, целевая версия Android 5.1.1.
ABI - двоичный интерфейс приложения (Application binary interface)- это образ аппаратной части выбираемой аппаратной платформы создаваемого виртуального устройства. Здесь как раз и следует выбирать x86 образ, который был установлен нами ранее.
Target - целевая версия Android это версия API, на которую ориентировано приложение. Выберем самую новую.
Лучше всегда использовать более новую версию потому, что она содержит более новую версию компилятора и дополнительные проверки, позволяющие в автоматическом режиме находить часто встречающие ошибки. Кроме того:
- использование самой последней версии гарантирует, что у нас корректный и оптимальный код.
- это нас ни как не ограничивает, чтобы поддерживать более старые версии платформы в готовом приложении.
Если необходима поддержка более старых версий, то необходимо перед созданием виртуального устройства скачать и установить соответствующие пакеты (точно так же как описана установка примеров из SDK приведенная выше).
Если мы ошибочно выберем образ системы, который нами не установлен, то будет выдано соответствующее предупреждение : Consider using an x86 system image for better emulator performance (рассмотрите использование образа системы x86 для повышения производительности эмулятора). Соответствующий экран представлен ниже.

Переходим к следующему экрану. Здесь при необходимости можно внести изменения в характеристики создаваемого виртуального устройства.


Обратим внимание на следующие параметры:
AVD Name — Имя устройства. Можно задать какое нравится, рекомендую указывать что-то простое, на латинице, без пробелов, например, имя устройства и номер AIP: Nexus_S_API22.
Startup size and orientation
Scale – позволяет изменить размер эмулятора на экране монитора.
Orientation - позволяет задать книжную или альбомную ориентацию
Emulated performance - производительность эмулятора.
Use Host GPU — использование аппаратного ускорения графики при работе эмулятора. Рекомендуется включить данную опцию — так графика в эмуляторе будет работать быстрее.
Snapshot — снимок системы — при включении этой опции эмулятор виртуального устройства будет сохранять свое состояние при рестарте, т.е. после включения (загрузки) получаем устройство в том же состоянии как перед выключением (выгрузкой) эмулятора. Данную опцию пока трогать не будем, оставим ее в выключенном состоянии.
Camera - камера
Front Back - включение эмуляции камер (фронтальной и основной), при желании можно вывести через них картинку с web-камеры. Оставим значения по умолчанию — None, так как в простых учебных примерах камеры практически не применяются, а «боевые» приложения, использующие «сложные» аппаратные возможности надежнее отлаживать на реальных устройствах.
Memory and Storage — опции памяти и внутреннего хранилища.
Здесь указывается, сколько оперативной (RAM) памяти будет доступно в эмуляторе, а так же размер VM Heap — количество доступной памяти для одного экземпляра приложения. Рекомендуется эти значения указывать исходя из ресурсов реальных устройств, поэтому оставим значения по умолчанию (512 и 32). Однако, при увеличении этих параметров приложение в эмуляторе будет работать быстрее, но следует помнить что вы разрабатываете приложение для реального устройства, где объем оперативной памяти жестко задан производителем устройства и поменять его невозможно.
Internal Storage — внутреннее хранилище. Здесь указывается объем внутреннего устройство хранения, опять таки — указывайте значение, которое возможно на реальном устройстве.
SD Card — SD карта. Здесь, если требуется, можно указать параметры используемой виртуальной SD карты памяти (которые используются на реальных устройствах повсеместно, для расширения внутреннего хранилища). Оставим поле Size (размер) пустым — пока что не будем использовать SD карту. Для удобства программиста здесь же можно указать готовый образ SD карты в файле, если такая необходимость есть.
Frame Frame – имитировать ли внешний вид реального устройства.
Skin — скин эмулятора. Включение отображения аппаратных элементов управления в окне эмулятора (hardware buttons). Так же воспользуемся данным пунктом, что бы видеть кнопки устройства в окне эмулятора.
Keyboard — клавиатура. Включение представления аппаратной клавиатуры (hardware keyboard). Воспользуемся данным пунктом.

Теперь осталось запустить и проверить все ли настроено верно. Выбираем созданный эмулятор и запускаем его кнопкой "Start”.

Далее идем в настройки и выполняем следующие действия:
- Устанавливаем русский язык
- Проверяем работает ли эмулятор в режиме поддержки технологии виртуализации ( образ x86)
Если все было сделано правильно, то для нашего примера, в поле "Модель" мы увидим строку "Android SDK Build for x86".
Автомобили с полным приводом это улучшенная управляемость, повышенная безопасность и проходимость. Но когда дело доходит до выбора конкретных моделей, то возникает вопрос: чем отличаются друг от друга разные технологии полного привода? В этой статье мы рассмотрим AWD-привод и сравним его с другими похожими технологиями.
Что значит AWD

Аббревиатура AWD расшифровывается как All wheel drive. На русский язык это переводится как «привод на все колёса». Как видно, из названия нисколько не понятно, в чём заключается особенность этой технологии, и чем она отличается от 4WD. Но для приблизительной ориентации можно воспользоваться небольшим лайфхаком: трактовать первую букву А как «Automatic», а не «All». Потому что AWD это преимущественно автоматическая система, работающая независимо от водителя.
Вот как это выглядит. Каждое колесо — точнее, приводная система каждого колеса — снабжается множеством датчиков и сенсоров. Они замеряют угловую скорость вращения, степень проскальзывания колёс, иногда — фиксируют тип дорожного (или бездорожного) покрытия. Все эти данные передаются в компьютер, который анализирует их согласно своей программе. И в зависимости от обстановки и поведения каждого колеса, компьютер начинает динамически распределять мощность и крутящий момент по осям или даже по каждому колесу отдельно.
Системой AWD снабжаются почти треть современных кроссоверов и пикапов. Типичные модели:
- Acura MDX;
- Honda Pilot;
- Infinity FX;
- Mitsubishi Outlander;
- Huyndai Santa Fe;
- Jeep Grand Cherokee;
- Land Rover Freelander;
- Nissan Murano;
- Subaru Forester;
- Toyota RAV4;
- Audi Q7;
Как работает AWD
Типичный сценарий работы All-wheel drive таков. Представьте, что вы едете по нормальной дороге, пусть даже с кочками и лужами, но всё же далёкой от состояния бездорожья. Понятное дело, что в таких условиях полный привод ни к чему, потому что это вызывает повышенный расход топлива. Вполне достаточно привода на передние колёса — это и экономично, и обеспечивает хорошую управляемость.
Совсем другое дело, когда вы съезжаете на грунтовую дорогу, особенно если недавно прошёл дождь, и грунт превратился в грязь. На двух ведущих колёсах можно основательно «засесть» в какой-нибудь яме или луже. Поэтому бортовой компьютер AWD автоматически подключает задние колёса, перебрасывая на них часть мощности двигателя. Автомобиль становится полноприводным. Но и здесь есть некоторые отличия от традиционных полноприводных машин.
Традиционная технология полного привода — 4WD, как правило, распределяет мощность между осями и колёсами поровну. В случае с AWD почти всегда большую часть получает передняя ось, на неё приходится от 60 до 90 процентов мощности и крутящего момента двигателя. Лишь некоторые производители вроде Audi и Subaru предусматривают привычное равное (50/50) распределение между осями.
Ещё одно отличие от 4WD — отсутствие пониженных передач и возможности блокировок дифференциалов. Многим любителям бездорожья такое отсутствие «взрослых» опций не нравится, и их негодование вполне обосновано. Ведь пониженная передача значительно повышает мощность, которая подаётся на колёса, а блокировки дифференциалов исключают проскальзывание колёс. Без этих функций штурмовать серьёзное бездорожье довольно безрассудно.
Съезжая с асфальтированной дороги на автомобиле с AWD, помните, что успех поездки зависит, главным образом, не от вашего водительского мастерства, а от качества программы бортового компьютера. Некоторые производители привносят в All-wheel drive элементы традиционного 4WD, предусматривая ручное управление, но это редкость. В общем, AWD прекрасно подходит для езды по лёгкому бездорожью, но не по глухим глубоким топям.
Плюсы и минусы AWD

Сильные стороны технологии:
- относительная простота и дешевизна конструкции;
- полностью автономное управление;
- от водителя не требуется специальных знаний и навыков;
- высокая экономичность потребления топлива;
- программы прекрасно работают на грунте, песке, снеге;
- компьютер может предугадывать проблемы в движении;
- намного более высокая точность и скорость реакции на ситуацию;
- более щадящие нагрузки на двигатель и трансмиссию.
Слабые места All-wheel drive:
- нет пониженных передач и блокировок дифференциалов;
- программа может совершать ошибки и неадекватные действия;
- водитель, как правило, никак не может влиять на поведение AWD;
- трансмиссия, в большинстве случаев, менее надёжна на фоне 4WD;
- на шоссе машина теряет все преимущества полного привода;
- более ограниченные способности к транспортировке грузов;
- меньший дорожный просвет и клиренс по сравнению с 4WD.
Таким образом, выбор между автомобилями с 4WD и AWD напрямую зависит от того, в каких условиях вы планируете использовать авто. Если вам нужна повседневная машина, на которой можно иногда выбраться на природу, то AWD — идеальный вариант. Ну а для поездок на охоту или рыбалку в глубины дикой природы, или для перевозки грузов по остаткам разрушенных дорог пригодны только тяжёлые внедорожники или пикапы с постоянным полным приводом и комплектом внедорожных опций.
25 октября 2018 Категория: Секреты автомобилей.
Не все знают, как расшифровываются типы привода современных авто - RWD, FWD, 4WD, AWD. Давайте посмотрим, в чем особенности, преимущества и недостатки каждого типа привода.
RWD - задний привод
Задний привод - классический, им оснащались первые автмомобили еще в 30-х гг. прошлого века.
Двигатель располагается спереди, крутящий момент передается через КП, карданный вал и мост на заднюю ось колес.
Сегодня RWD встречается на старых авто и некоторых современных автомобилях премиум-класса (BMW, Toyota), а также устанавливается на спорткары. Особенно ценят задний привод любители дрифтинга.
Достоинства заднего привода - автомобили на нем отличаются отличной динамикой разгона, потому что когда водитель нажимает на газ, вес машины передается на заднюю ось.
Из-за того, что на авто с задним приводом передняя пара колес только задает траекторию поворота, уменьшается его радиус, что позволяет водителю удачно «вписываться» в изгибы дороги даже на большой скорости. Кузов на заднеприводных автомобилях не вибрирует от работы двигателя вообще, что повышает комфорт пассажиров.
Из минусов привода RWD - дороговизна его исполнения, а также конструктивные особенности: из-за наличия карданного вала, через который передается крутящий момент на колеса, используются специальные туннели, в результате полезная площадь внутри салона и багажника уменьшается.
FWD - передний привод
Передний привод устанавливается на абсолютное большинство современных автомобилей.
Двигатель и КП расположены спереди, чаще - поперечно. Крутящий момент от мотора посредством ШРУСа передается на колеса передней оси.
Двигатель в автомобилях с FWD может устанавливаться продольно или поперечно установлен находиться перед, за, или над передней осью.
Встречается три типа компоновки мотора переднеприводных авто:
- последовательная, когда двигатель, главная передача и коробка передач размещены друг за другом на одной оси;
- параллельная, когда двигатель и трансмиссия располагаются на двух параллельных осях на одной высоте;
- этажная, когда двигатель расположен над трансмиссией.
В любом случае, главной отличительной чертой устройства переднего привода является то, что двигатель, КП, привод и дифференциал объединены в единый блок передачи крутящего момента на переднюю ось.
Это одновременно преимущество и недостаток FWD: такое решение более выгодно в производстве, а отсутствие карданного вала позволяет максимально использовать пространство салона и снизить общий вес автомобиля. В то же время, конструкция самого узла усложняется, сложность ремонта возрастает.
Плюс нюансы по управляемости - да, заднеприводной автомобиль легче срывается в занос, но и выйти из него на RWD проще.
К преимуществам переднеприводных автомомобилей относят легкость в управляемости, хорошую проходимость - прибавив «газу», на машине с FWD можно выбраться из снежной каши и подняться под горку, потому что вес передней части автомобиля не смещается назад и передние колеса гребут, тащат машину за собой.
Зимой из-за того, что вес двигателя нагружает ведущую переднюю ось, создается лучшее сцепление с дорогой. Поэтому автомобили с передним приводом рекомендованы новичкам.
А еще переднеприводные автомобили - это выгодно. Во-первых, массовость их производства и констррукция обходится производителю и, следовательно, покупателю дешевле других типов привода. Во-вторых, из-за короткой трансмиссии двигатель теряет в мощности меньше, чем в случае с задним или полным приводом, что выражается в меньшем расходе топлива. Да и в обслуживании автомобили с FWD дешевле.
К минусам переднеприводных автомобилей относят низкий акустический комфорт - водитель всегда будет ощущать вибрации от двигателя, которые передаются на кузов.
Из-за того, что шарнир равных угловых скоростей полностью совмещен с рулевым управлением, на машинах с FWD радиус поворота будет выше, чем в случае заднеприводного авто - и это надо учитывать, заранее тормозить перед тем, как входить в поворот. Сами шарниры догостоящие, и если выходят из строя, владелец сталкивается с дорогостоящим ремонтом.
Из-за того, что передние колеса на автомобилях с FWD чрезмерно нагружены (они и передают крутящий момент, и управляют движением автомобиля, и демпфируют неровности дороги), а центр тяжести смещен на переднюю ось, маневренность переднеприводных автомобилей и динамика разгона оставляет желать лучшего. При интенсивном разгоне на переднеприводном автомобиле передние колеса могут пробуксовывать.
Если на переднеприводном автомобиле двигатель расположен поперечно, на колеса ставятся ШРУСы разной длины, что приводит к тому, что при ускорении машину начинает тянуть вправо или влево - и владелец вынужден применять «силовое подруливание», что также не добавляет комфорта вождению.
4WD - полный привод (постоянный и подключаемый)

Встречается два типа полного привода- постоянный (Full-Time) и подключаемый (Part-Time).
- В первом варианте крутящий момент перманентно передается на заднюю и переднюю ось, как правило, в соотношении 50/50.
- Во втором по умолчанию задействуется одна ось, но при необходимости подключается и другая.
Существует также «полный привод по требованию», который активируется кнопкой в салоне или решением управляющей электроники. Но он относится уже к типу AWD.
Подключаемый полный привод (Part-Time) достаточно просто устроен: передний мост жестко подключен, задний подключается посредством простой механической муфты - и никаких дифференциалов.
Из-за такого жесткого зацепления, распределение крутящего момента по осям одинаковое.
Таким типом полного привода оборудованы настоящие внедорожники (УАЗ, Toyota Land Cruiser 70, Nissan Patrol, Suzuki Jimny), пикапы (Ford Ranger, Nissan Navara) и военная техника.
Такие автомобили обладают фантастической проходимостью, а вот на асфальте это заднеприводная техника, которая требует к себе особого отношения. В частности, такой тип подключаемого полного привода на дорогах с твердым покрытием оборачивается сниженной управляемостью. Высокая нагрузка на трансмиссию быстро выводит ее из строя. Покрышки стираются тоже достаточно быстро.
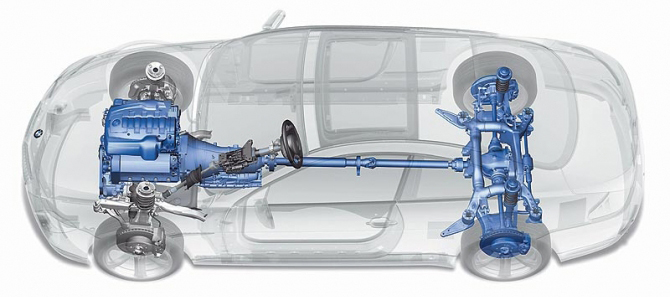
Постоянный полный привод (Full-Time) - пожалуй, самый технически сложный и дорогостоящий тип привода современных автомобилей.
В данной конструкции присутствует и межосевой дифференциал, и межколесные дифференциалы для оптимального распределения передаваемой мощности на каждое колесо. А к межосевому дифференциалу прилагается и механизм его блокировки, который увеличивает проходимость автомобиля.
Сегмент постоянного полного привода - премиальные внедорожники типа Mercedes Gelendewagen. Также привод 4WD с блокировкой межосевого дифференциала применяется как дорогая опция на премиальных автомобилях, которая повышает стабильность машины и придает ей отличные динамические характеристики.
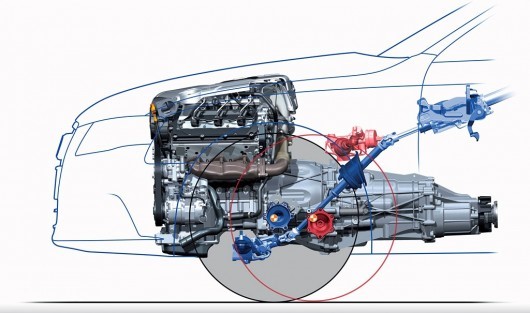
Причем чтобы постоянный полный привод не требовал других приемов управления, производители стремятся придать таким автомобилям характер заднеприводных, неравномерно (например, 30/70, как в Mercedes-Benz в версии 4Motion) распределяя нагрузку между осями. Или предусматривают распределение крутящего момента не только между передним и задним мостом, но и между колесами, что позволяет достичь превосходной управляемости, особенно в поворотах, когда до 70% крутящего момента перекидывается, например, на внешнее заднее колесо. Пример воплощения - система привода Honda SH-AWD.
Как видим, основное преимущество полноприводных автомобилей - их проходимость, быстрая динамика, отсутствие пробуксовывания колес, малый риск заноса.
Оптимальное распределение крутящего момента по осям и колесам дает замечательную курсовую устойчивость автомобилю, особенно в поворотах.
К недостаткам постоянного полного привода относится сложность конструкции, обилие дополнительных устройств и управляющей электроники - все это сказывается и на стоимости автомобиля, и на стоимости его эксплуатации и ремонта.
Расход топлива на полноприводных автомобилях существенно выше за счет потери мощности в передаче крутящего момента сразу на две оси.
В целом, полный привод сегодня выполняет роль скорее дорогостоящей опции на премиум-автомобилях.
Действительно необходимым он остается только на брутальных рамных внедорожниках - но это уже совсем другая история.
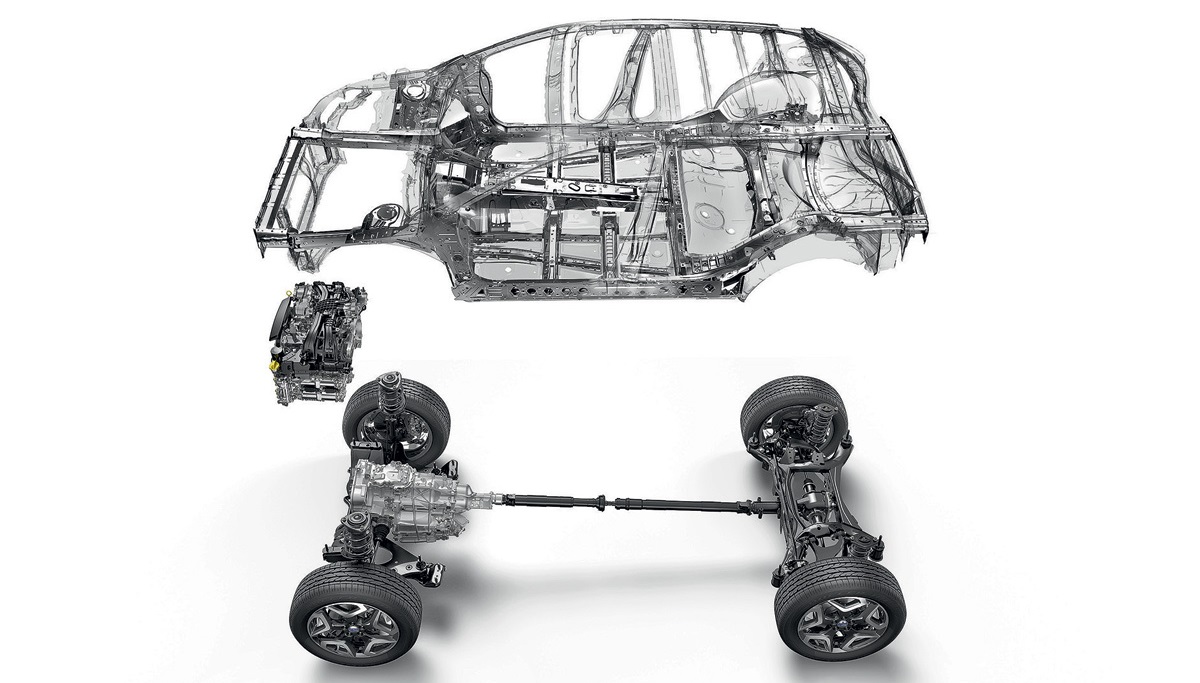
AWD - автоматически подключаемый полный привод
All-Wheel Drive - современный этап эволюции подключаемого полного привода.
Как и в случае с Part-Time приводом, вторая ось здесь подключается по требованию, но здесь для выполнения требования достаточно активировать соответствующий режим, нажав на копку в салоне. Другой вариант, когда вторая ось подключается при проскальзывании колес ведущей оси, автоматически.
Как правило, основной ведущей осью является передняя, а при необходимости подключается полный привод, и крутящий момент начинает перекидываться и на задний мост в соотношении в основном 60/40 на переднюю/заднюю ось.
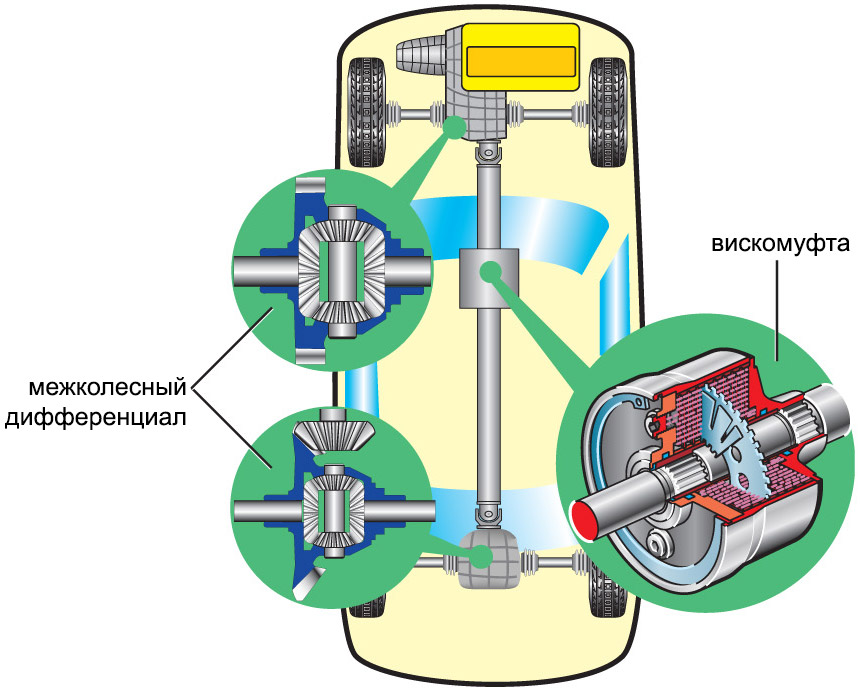
Реализуется это посредством межосевой муфты. Дифференциал отсутствует, а благодаря тому, что гидравлическая или электромагнитная муфта допускает проскальзывание осей, улучшается управляемость автомобилем в режиме полного привода.
Отсюда следует и недостаток привода AWD - перегрев муфты из-за постоянного высокого трения. В этом случае муфта или перестает подавать крутящий момент, или вовсе выходит из строя. Из-за этого серьезные офф-роадные условия таким машинам противопоказаны.
Особенностью автомобилей с AWD является «защита от дурака». То есть владелец может перед трудным участком дороги заблокировать муфту, чтобы полный привод остался включенным, но если электроника определит скорость как превышающую безопасную при данном режиме движения, муфра может самостоятельно разблокироваться.
Повсеместно AWD встречается на кроссоверах типа Renault Duster, Nissan Terrano, Mitsubishi Outlander, Toyota RAV4, Kia Sportage и др. Популярность этого типа привода только растет.
Преимущества привода AWD - он более экономичен в плане топливного расхода, чем полноценный полный привод, при этом существенно помогает водителю в сложных ситуациях - крутой подъем, резкое ускорение и плохое покрытие дороги.
Минусы AWD - сложная конструкция, лишний вес, дороговизна обслуживания и ремонта. По сравнению с классическим полным приводом, All-Wheel Drive менее долговечна и надежна.
Какой привод в автомобиле выбрать
Первое, о чем стоит подумать при выборе типа привода - где вы живете и где собираетесь ездить.
Для езды по городу лучше выбирать передний или задний привод. Сцепления с дорогой одной оси вполне хватит для уверенной езды по асфальту и трассе, а вы сэкономите не только на стоимости автомобиля, но и на его обслуживании и расходах на топливо. Для зимней эксплуатации купите хорошую зимнюю резину - этого хватит, чтобы чувствовать себя уверенно на дороге.
Если снега в вашем регионе выпадает много, между задним и передним приводом выбирайте передний - за счет большого веса передней оси передние колеса имеют большее сцепление с дорогой, и шансов забуксовать и уйти в занос у вас будет меньше.
Автомобили с приводом AWD как компромиссный вариант между полным и передним приводом справятся с легким бездорожьем, вроде съезда с дороги на тропу и гравий, но не предназначены для того, чтобы «месить грязь». Да и клиренс у паркетников существенно ниже, и геометрической проходимостью настоящих внедорожников они не отличаются.
Другой важный критерий выбора - ваши материальные возможности.
- Паркетники с AWD - лучший выбор для города и зимней эксплуатации, если водителя не пугают расходы на топливо и сервисное обслуживание.
- Хотите экономить и ездите в основном по городу? Покупайте переднеприводной автомобиль.
- Для получения драйва от вождения стоит присмотреться кзаднеприводным автомобилям. Не стоит их выбирать, если вы неопытный водитель - они требуют мастерского обращения из-за высокой динамики разгона и опасностью уйти в занос / дрифт.
- Полноприводные автомобили рекомендованы обитателям местности с трудными погодными условиями и плохо проходимыми дорогами. Они подойдут жителям горной местности и любителям офф-роад маршрутов. Для остальных 4WD - просто очень дорогая опция, повышающая управляемость премиальных автомобилей.
О самых распространенных типах подвески мы писал здесь.
Качественные запчасти для вашего автомобиля предлагает наша разборка
ООО «РитейлМоторс» УНП 191477517, з арегистрировано Мингорисполкомом 20 марта 2012г.
Регистрационный номер в торговом реестре 402310, д ата регистрации 11 января 2018г.
Юридический и почтовый адрес: 220020 г. Минск, ул. Тимирязева, д. 85а, пом. 204
Читайте также: